







Dimensions (sans en-têtes ni bornier) 2.5 « x 1″ x 0.1 » (62.5mm x 25.4mm x 3mm)
Poids (sans en-têtes ni bornier): 5.5 grammes
Poids (avec 3×4 têtes et bornier): 9 grammes
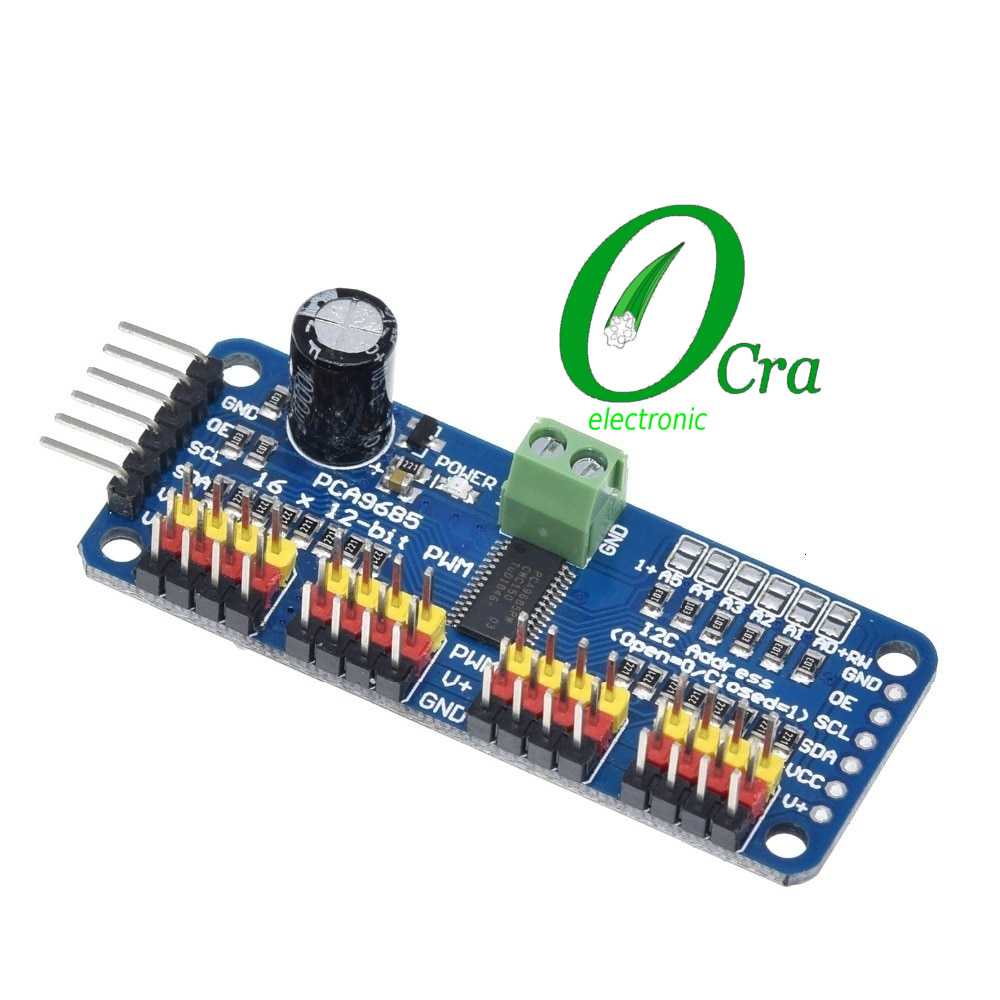
Cette carte/puce utilise une adresse I2C 7 bits entre 0x60-0x80, sélectionnable avec des cavaliers
Bornier pour l’entrée d’alimentation (ou vous pouvez utiliser les évents de 0.1 « sur le côté)
Protection contre l’inversion de polarité sur l’entrée du bornier
Puissance verte-bonne LED
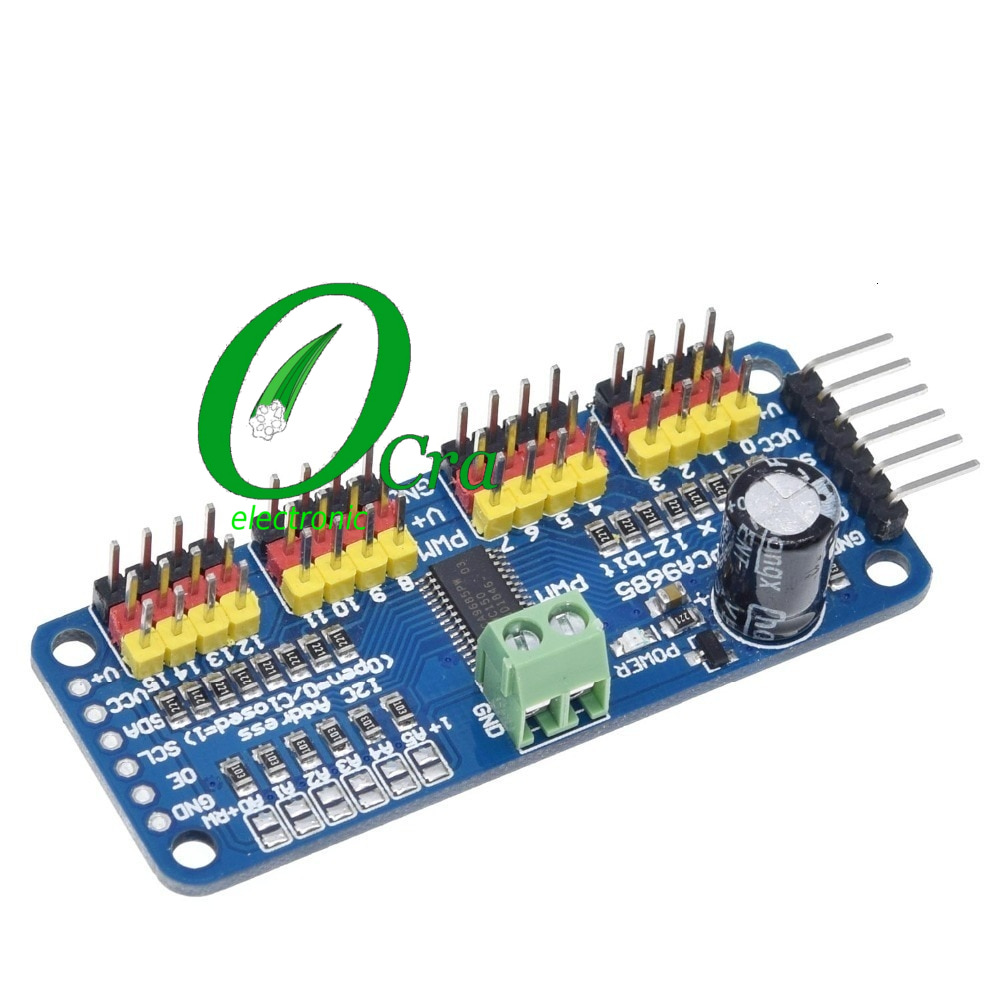
Connecteurs à 3 broches par groupes de 4 pour pouvoir brancher 16 servos à la fois (les fiches Servo sont légèrement plus larges que 0.1 « , donc vous ne pouvez en empiler que 4 à côté les uns des autres sur une tête de 0.1 »
Conception «capable de la chaîne»
Un endroit pour placer un gros condensateur sur la ligne V + (au cas où vous en auriez besoin)
Résistances de la série 220 ohm sur toutes les lignes de sortie pour les protéger, et pour rendre les LEDs de conduite triviales
Soudeurs pour les 6 broches de sélection d’adresse
I2c-controlled pilote PWM avec un construit en horloge. Contrairement à la famille TLC5940, vous n’avez pas besoin de l’envoyer en continu pour attacher votre microcontrôleur, son fonctionnement est totalement gratuit!
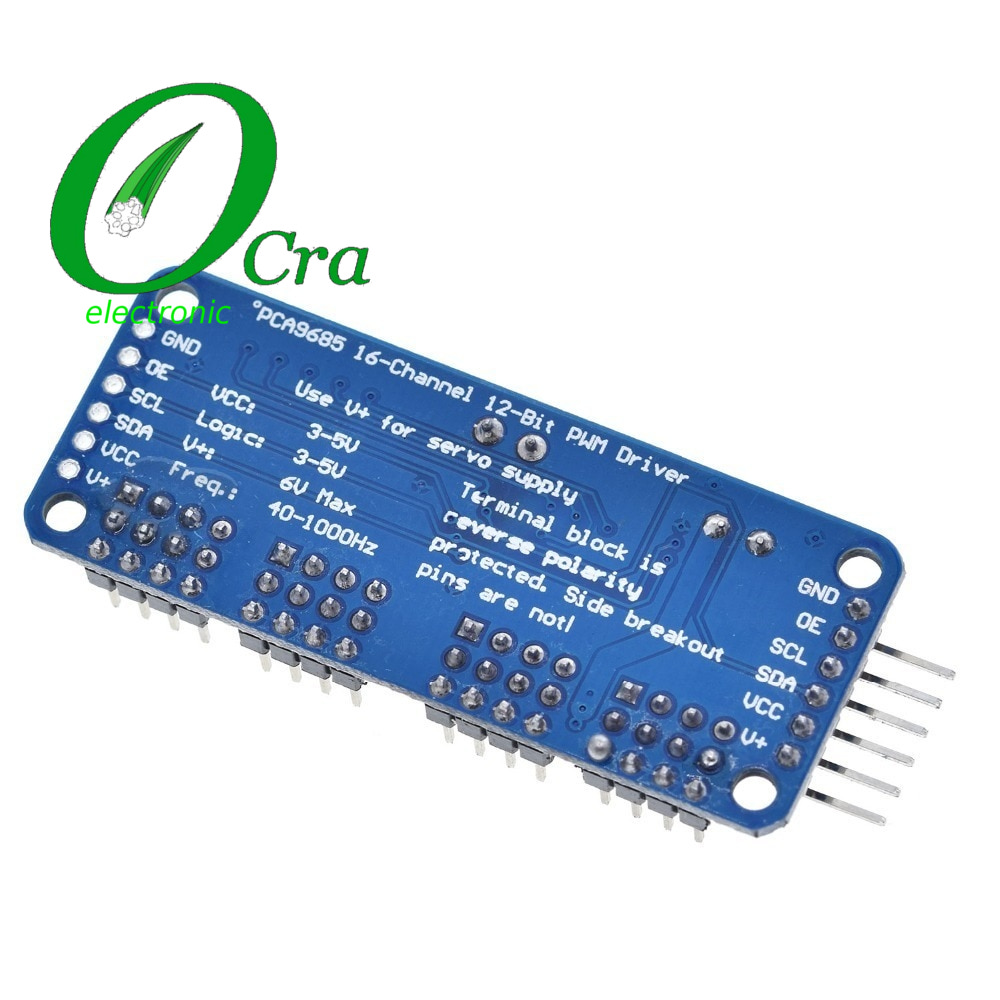
Conforme à la norme 5V, ce qui signifie que vous pouvez le contrôler à partir d’un microcontrôleur 3.3V tout en conduisant en toute sécurité des sorties jusqu’à 6V (c’est bien lorsque vous voulez contrôler des led blanches ou bleues avec 3.4 + tensions avant)
6 broches de sélection d’adresse pour pouvoir connecter jusqu’à 62 d’entre elles sur un seul bus i2c, un total de 992 sorties-c’est beaucoup de servos ou de led
Fréquence réglable PWM jusqu’à environ 1.6 KHz
Résolution 12 bits pour chaque sortie-pour les servos, cela signifie une résolution d’environ 4us à un taux de mise à jour de 60Hz
Sortie push-pull ou open-drain Configurable
La sortie permet à la broche de désactiver rapidement toutes les sorties
Mode d’emploi:


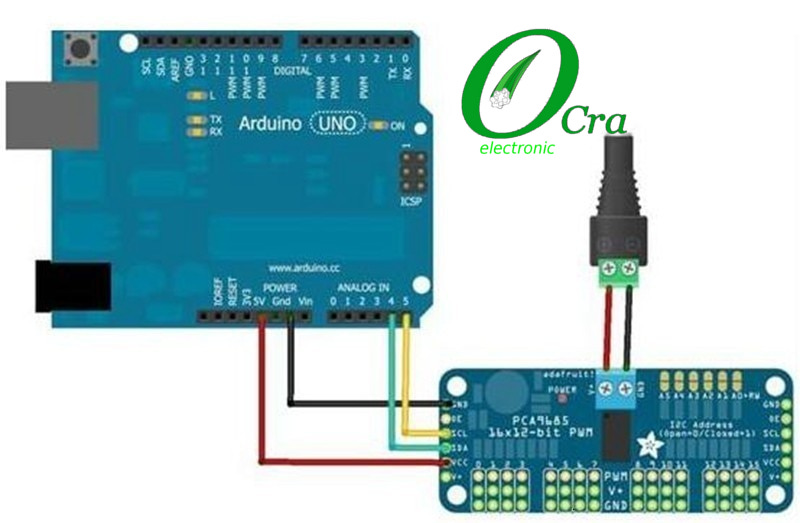
(1) carte d’entraînement connectée à Arduino:
La carte de pilote PWM utilise la méthode I2C, de sorte que seulement quatre lignes peuvent être connectées à l’appareil Arduino:
Mode pin Arduino «classique»:
+ 5v -> VCC
GND -> GND
Analogique 4 -> SDA
Analogique 5 -> SCL
Ancienne façon Mega pin:
+ 5v -> VCC
GND -> GND
Numérique 20 -> SDA
Numérique 21 -> SCL
R3 et plus tard méthode de broche Arduino (Uno, Mega &
Leonardo):
(Ces cartes ont des broches SDA et SCL dédiées)
+ 5v -> VCC
GND -> GND
SDA -> SDA
SCL -> SCL

VCC broches est seulement pour la puce d’alimentation, si vous souhaitez connecter le servo ou LED lumières, utilisez le V + broches d’alimentation, la broche V + prend en charge l’alimentation 3.3 ~ 6V (tension de sécurité de la puce 5V). Il est recommandé de connecter l’alimentation externe via la borne d’alimentation.
(2) partie d’alimentation:
La tension de conception du servo est de 5 ~ 6V, en particulier dans un certain nombre d’appareils à gouverner en même temps, avec le besoin d’une alimentation haute puissance. Si vous utilisez directement la broche Arduino 5V pour alimenter directement le servo, il y a des problèmes instables, nous vous recommandons donc d’avoir une alimentation externe appropriée pour la carte de lecteur.
(3) connectez le servo:
La plupart des servos sont connectés à l’aide de fiches femelles standard à 3 fils, à condition que la broche correspondante dans la carte de pilote. (Le fil de terre est généralement noir ou marron, la ligne de signal est généralement jaune ou blanc)

(4) pour l’adresse indiquée par le tableau de bord:
Chaque carte d’entraînement de la cascade doit avoir une adresse d’accès unique. L’adresse I2C initiale de chaque carte de pilote est 0 × 40, vous pouvez modifier le coin supérieur droit de l’adresse I2C du cavalier. Connectez un cavalier à souder pour indiquer un numéro binaire «1».
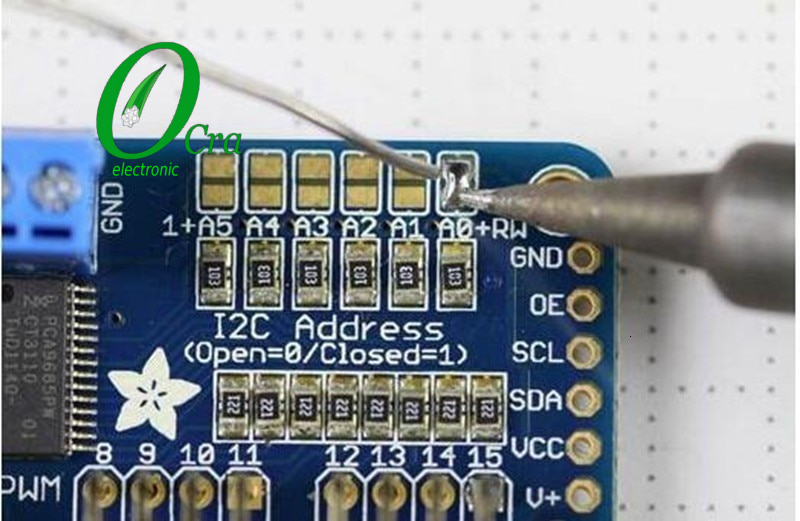
Tip 0: Address = 0x40
Offset = binary 00000 (default)
Card 1: address = 0x41 offset = binary 00001 (as shown above, connected to A0)
Card 2: address = 0x42 offset = binary 00010 (connect to A1)
Card 3: address = 0x43 offset = binary 00011 (connect A0 and A1)
Card 4: address = 0x44 offset = binary 00100 (connect to A2)
And so on..
Example Code:
# Inclure <Wire.h>
# Include
<Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm1 =
(0 × 40);
Adafruit_PWMServoDriver pwm2 =
(0x41);
Empty configuration () {
Series. Start (9600);
Series. println (« 16 channels
Test PWM! « );
Pwm1.begin ();
(1600); //
This is the maximum PWM frequency
Pwm2.begin ();
(1600); //
This is the maximum PWM frequency
}}